



Pulsstyrd 2-fas sluten stegmotor T60Plus


Produktintroduktion



Förbindelse

Drag
| Strömförsörjning | 18~48VDC |
| Kontrollprecision | 4000 pulser/varv |
| Pulsläge | Riktning och puls, medurs/moturs dubbelpuls, A/B kvadraturpuls |
| Nuvarande kontroll | Servovektorkontrollalgoritm |
| Inställning för underavdelning | DIP-omkopplarinställning, 15 alternativ (eller felsökningsprograminställning) |
| Hastighetsområde | Konventionell 1200~1500 rpm, upp till 4000 rpm |
| Resonansundertryckning | Automatisk beräkning av resonanspunkt för att undertrycka mellanfrekvensvibrationer |
| PID-parameterjustering | Felsökningsprogramvara för att justera motorns PID-karakteristik |
| Pulsfilter | 2MHz digitalt signalfilter |
| Larmutgång | Larmutgång för överström, överspänning, positionsfel etc. |
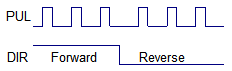
Pulsläge
Signalgränssnittet för standard T-seriens drivsystem är pulsformat, och T60PLUS V3.0 kan ta emot tre typer av pulskommandosignaler.
| Puls och riktning (PUL + DIR) |
|
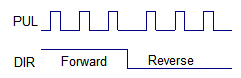
| Dubbelpuls (medurs + moturs) |
|
| Ortogonal puls (A/B ortogonal puls) | 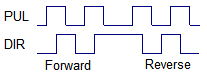 |
Mikrostegsinställning
| Puls/varv | SW1 | SW2 | SW3 | SW4 | Anmärkningar |
| 3600 | on | on | on | on | DIP-omkopplaren vrids till tillståndet "3600" och testprogramvaran kan fritt ändra andra underavdelningar. |
| 800 | av | on | on | on | |
| 1600 | on | av | on | on | |
| 3200 | av | av | on | on | |
| 6400 | on | on | av | on | |
| 12800 | av | on | av | on | |
| 25600 | on | av | av | on | |
| 7200 | av | av | av | on | |
| 1000 | on | on | on | av | |
| 2000 | av | on | on | av | |
| 4000 | on | av | on | av | |
| 5000 | av | av | on | av | |
| 8000 | on | on | av | av | |
| 10000 | av | on | av | av | |
| 20000 | on | av | av | av | |
| 40000 | av | av | av | av |
Mikrostegsinställning
Är drivterminalerna utbrända?
1. Om det är kortslutning mellan terminalerna, kontrollera om motorlindningen är kortsluten.
2. Om det inre motståndet mellan terminalerna är för stort, kontrollera det.
3. Om för mycket lödning läggs till i anslutningen mellan trådarna för att bilda en lödboll.
Har en sluten stegmotor larm?
1. Om det är ett anslutningsfel för pulsgivarens anslutning, se till att använda rätt pulsgivares förlängningskabel, eller kontakta Rtelligent om du inte kan använda en förlängningskabel av andra skäl.
2. Kontrollera om kodaren är skadad, till exempel signalutgången.
-
 Rtelligent T60PLUS V3.0 användarmanual
Rtelligent T60PLUS V3.0 användarmanual




